1. Gedurende de wintermaanden laadt U het best Uw batterijen (met uitzondering van LIPO en LIFE batterijen) volledig op alvorens deze op te bergen.
NiMh en NiCa batterijen om de 2 maand normaals aan een langzame laadbeurt geven.
Bewaar Uw batterijen op huiskamertemperatuur.
Lipo batterijen bewaar je het best op 50 percent van hun capaciteit (+/- 3,8V per cel, niet lager).
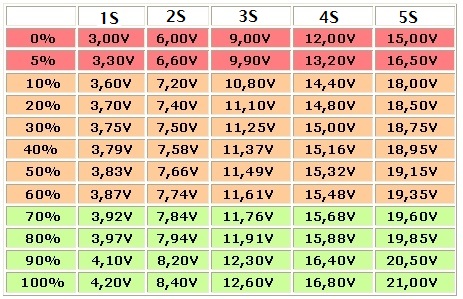
2. Lipo batterijen mogen nooit onder de 25-30 percent van hun capaciteit gaan want dan verliezen ze een deel van hun capaciteit (of gaan in het slechtste geval defect)!
3. Onderhoud :
Zorg ervoor dat Uw schaalmodellen binnenin volledig droog zijn alvorens deze op te bergen.
Na gebruik is het beter deze minimaal 24 uur open te laten zodat alle vocht kan verdampen.
Afhankelijk van het type vaarwater waarin je hebt gevaren is het aangeraden om de koelleidingen (enkel bij watergekoelde motoren) te doorblazen of te spoelen met zuiver water want anders kunnen zich onaangename geurtjes ontwikkelen :-)
Vaste schroefassen bij voorkeur 1 maal per jaar reinigen en het vet vervangen .
Flexi schroefassen van brushless boten kan je best na iedere vaarbeurt reinigen en opnieuw invetten.
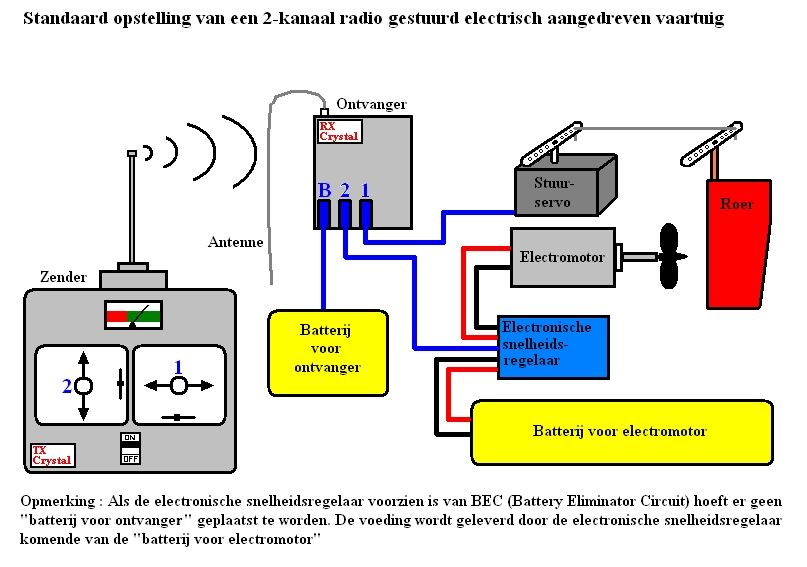
4. Hoe werkt de afstandbediening ?
4. RC frekwenties :
De frekwenties in de 35 Mhz band zijn gereserveerd voor vliegende modellen.
De frekquenties in de 27, 40, 41 en 72 Mhz band mogen gebruikt worden voor modelbouwboten doch de meeste modelbouwers gebruiken nu 2,4 Ghz omdat zo uitgesloten wordt dat iemand dezelfde frequentie gebruikt (en men aldus elkaar niet meer kan storen).
Voor duikboten/onderzeeboot kan je enkel een FM-frekwentie (40, 41 of 72 Mhz) gebruiken omdat een 2,4 Ghz signaal niet door het water gaat.
5. BRUSHLESS HYDRO SETUP
Inleiding:
Regelmatig zien wij aan ons vaarwater mensen die een nieuwe of 2dehands
aangekochte ARTR of RTR speedboot willen testen zonder daar diep over nagedacht
te hebben. Meestal resulteert dit in problemen en/of teleurstelling en zal de
boot binnen de kortste tijd op de kast belanden of online opnieuw te koop
aangeboden worden.
Met onderstaande wil ik graag iedereen wat meer informeren en familiariseren
met de wereld van brushless hydro speedboten en dit op een semi-professionele
manier. Ongeacht ik vermeld dat het hier over betaalbare hardware gaat is alles
toch nog altijd prijzig, zeker als je een boot wilt dat vlugger dan 50 km/h kan of
moet varen. In het algemeen behandel ik ook enkel maar hydro-(speed)boten met
brushless inrunner motoren.
Brushless
motoren in RC boten:
Brushless motoren worden voornamelijk gebruikt in hoge snelheidsboten.
Boten met een schroef dat permanent onder water blijft gebruiken het best een
"outrunner"(schroef bevindt zich aan de onderzijde van de romp).
Hydro boten gebruiken bij voorkeur een "inrunner" (hydro = schroef
komt via stinger, strut of schroefas uit de spiegel en op snelheid komt het
schroef zelf voor de helft uit het water).
Outrunner motoren leveren wat meer koppel dan een inrunner maar zijn wel
beperkter in toerental en moeilijker te koelen.
Bij een motor wordt altijd een KV vermeld wat staat voor "Velocity
Constant".
KV is het aantal omwentelingen (RPM) per Volt.
Voorbeeld : een 2200KV motor met een 3S Lipo (11,1V) = 2200 x 11,1 = 24420
omwentelingen zonder belasting/weerstand.
Belangrijk om weten is dat hoe hoger de KV’s hoe hoger het stroomverbruik zal
zijn.
Het stroomverbruik kan je wat beperken door de combinatie van lagere KV met
lipo’s met een hogere spanning. Een 1500KV op 6S zal bijvoorbeeld minder
verbruiken dan 2200KV op 4S ongeacht er bijna hetzelfde toerental wordt bereikt.
Er wordt eveneens een vermogen vermeld in Watt. Hoe hoger het Wattage hoe meer vermogen
(koppel/kracht) de motor zal hebben wat noodzakelijk is bij het gebruik van
schroeven met een grotere diameter (>42mm).
De afmetingen van een brushless inrunner motoren worden in 4 cijfers
uitgedrukt. Een 3674 motor heeft bijvoorbeeld een diameter van 36mm en een
lengte van 74mm. Zo bestaan er inrunners met een diameter van 28, 36, 40 en
56mm en met lengtes variërend van 45, 50, 60, 65, 74, 82 tot zelfs 92mm.
Hoe groter de motor van diameter en lengte is hoe groter het vermogen zal
worden en aldus ook het verbruik.
Waterkoeling
Gezien men met brushless motoren een veel hoger toerental kan behalen dan met
brushed motoren is waterkoeling heel belangrijk. Een metalen koelmantel omheen
de inrunner werkt optimaal als deze minimaal 75% van de motorbehuizing omvat. Een
afzonderlijke koeling (niet gecombineerd met de ESC) is een aanrader maar dan
is er wel een dual water pick-up nodig. Mijn persoonlijke voorkeur gaat eveneens
uit naar een (al dan niet dual) water pick-up dat geïntegreerd is in het roer
omdat deze voor een betere waterdoorstroming zorgt dan die pick-up buisjes
gemonteerd op de spiegel of onderaan de romp.
De binnendiameter van de rubberen koelslangen is eveneens belangrijk. Hanteer
3-4mm binnendiameter als standaard.
Outrunner motoren hebben daartegenover enkel koeling via hun motorsteun en
worden in een afgesloten ruimte (romp) veel vlugger warm.
De ideale combinatie brushless motoren (diameter en KV), Spanning (Volt) en
schroef :
Voor Hydro boten (semi-professioneel) bedraagt het ideaal aantal omwentelingen
24.000 tot 35.000 afhankelijk van de doeleinden, zijnde plezier of
clubcompetitie. Belangrijk om weten is dat hoe hoger het aantal omwentelingen niet
altijd zal resulteren in een hogere snelheid. De combinatie van het aantal
omwentelingen, de grootte (en de pitch) van het schroef in combinatie met het
juiste vermogen speelt een heel belangrijke rol.
In onderstaande tabel heb ik een overzicht gemaakt wat volgens mij de betere
combinaties zijn om hydro boten (al dan niet V-hull (mono) of catamaran) een
snelheid van +/- 75 km/h te kunnen garanderen zonder dat je de elektronica
overbelast en het stroomverbruik in de mate van het mogelijke wat kan beperken.
Ik vermeld eveneens enkel de diameter van de schroeven en niet de pitch. Mijn
voorkeur gaat uit naar 1.4 pitch (zeker voor de grotere schroeven (>42mm).
Een metalen schroef (balanced of CNC aluminium) wordt eveneens aangeraden omdat
men hiermee al snel enkele km/h aan snelheid kan winnen.
Een tweeblad geniet eveneens mijn voorkeur. Een drieblad zal tegenover een
tweeblad wel altijd 1 blad in het water hebben doch hiermee zal het
stroomverbruik wel wat stijgen. Een regel om te hanteren is dat een drieblad
schroef altijd één maat kleiner moet zijn dan een tweeblad, bijvoorbeeld: een
tweeblad 42mm vervang je best door een 40mm drieblad.

Juiste
keuze van Lipo en connectoren:
Op een lipo wordt altijd de “continious” discharge rate vermeld en deze wordt
uitgedrukt in C. Voorbeelden hiervan zijn 25C, 45C, enz… Bij sommige lipo’s
wordt eveneens een “maximum” discharge rate vermeld. Theoretisch (in a perfect
world) betekend dit het volgende :
Een lipo met een capaciteit van 4000Mah (4Ah) en een continious discharge 25C
kan continu 100Ampère (4Ah x 25C) leveren. Als deze een maximum discharge heeft
van 50C dan kan deze maximum 10 seconden lang 200 Ampère (4Ah x 50C) leveren.
Zoals ik al vermelde is dit “in a perfect world” doch dit is niet het geval in
de realiteit. Uit ervaring weet ik dat een 4000Mah 25C lipo heel warm wordt
wanneer permanent 70A wordt gevraagd en dit is nooit een goede zaak als je uw
lipo’s een lang leven wil geven.
Een 45C lipo heeft trouwens een veel dikkere bedrading en is op zichzelf ook
opmerkelijk dikker dan een 25C lipo met dezelfde stroomsterkte!
Ik merk zelfs op dat mijn Lucas Oil (Leopard 3660 2050Kv – Swordfish 120A - 6mm gold bullets - 42mm Grimracer prop)
opmerkelijk sneller vaart op 60C dan op 45C.
In forums heb ik gelezen dat je de juiste discharge rate C het best als volgt
berekend teneinde altijd aan de vraag van je motor te voldoen en om de lipo op
een matige temperatuur te houden.
Voor de continious discharge rate moet je de C-waarde vermenigvuldigen met 3 en
om het echt veilig te houden (mijn persoonlijke voorkeur trouwens)
vermenigvuldig ik deze zelf met 2 in plaats van 3.
Voorbeeld: Als ik weet dat mijn brushless inrunner motor een verbruik van 72A
heeft (zie technische specificaties van de motor) dan voldoet een 25C nipt (x3
= 75A) maar is een 45C (3x = 135A) de betere optie.
Naast de keuze van de juiste discharge rate is de keuze van de juiste connector
ook heel belangrijk. Deans (T) connectoren zijn bijvoorbeeld prima tot 60A permanent
stroomverbruik (piek 75A).
Hoe hoger het stroomverbruik hoe warmer de solderingen worden met kans dat
minder kwalitatieve solderingen kunnen loskomen.
Hierbij mij voorkeuren voor connectoren :
<75A : Deans (T) of 4mm gold bullet
75-100A : 4 of 6mm gold bullet
100-180A : 6mm gold bullet
>180A : 8mm gold bullet
Persoonlijk is er bij mij nog nooit een soldering losgekomen als ik
bovenvermelde regel handhaaf.
De
juiste keuze brushless ESC:
Naast alle bovenvermelde combinaties is de juiste keuze van een ESC eveneens
belangrijk. Algemeen is het beter dat je wat reserve hebt, zijnde 1,5x het
gekende stroomverbruik van de motor. Wanneer het stroomverbruik groter wordt
dan 90A is het plaatsen van een afzonderlijke koeling (niet gecombineerd met de
motorkoeling) aan te raden (dual water pick-up). Blijf je bij een enkele
koeling laat de koeling eerst door de ESC vloeien en dan pas door de koelmantel
van de motor.
Uitbalanceren:
Er bestaan verschillende manieren om je boot perfect te balanceren.
Eén van de belangrijkste is het centraal zwaartepunt dat standaard op plusminus
1/3 van de spiegel moet liggen. Heeft je boot een lengte van 90 cm dan ligt
deze op 60cm van de boef of 30cm van de spiegel. Het centraal zwaartepunt kan
je eenvoudig aanpassen door de lipo’s voor- of achterwaarts te verplaatsen.
Fine-tuning om te varen op een vlak of licht gegolfd wateroppervlak doe je door het
instellen van de inclinatie en diepte van de flex-as koker ten opzichte van de
waterlijn van de romp (te regelen via de strut) of door de trim-tabs op- of
neerwaarts in te stellen.
Onderhoud:
Na elke vaarsessie verwijder je best de flex-as. Reinigen (ontvetten) en
opnieuw met high speed vet smeren en terugplaatsen.
Tijdens het verwijderen van de flex-as controleer je best ook de as van de
motor. Wanneer er zich wat speling voordoet moet je de kogellagers vervangen om
trillingen te vermijden.
Waterleidingen (dus ook het roer met water pick-up) spoelen met fris water bij
voorkeur na iedere vaarsessie.
Als je lange tijd niet zal varen (bv. Winter) dan moet je alle lipo’s in
“storage mode” bewaren (3,8-3,85V per cel = 50%).
Gebruikerstips:
Het is niet omdat er op de verpakking en handleiding van een ARTR of RTR-boot
staat dat deze 6S compatible is dat deze dit ook daadwerkelijk kan. Misschien 1
of 2x varen en de hardware raakt defect. Dit allemaal omwille van onvoldoende
koeling, te lichte bedrading of slechte lipo keuze.
Neem van mij aan dat een RTR boot tot 500 euro zelden sneller dan 50-60kmh zal
varen. RTR boten van boven de 500 euro kunnen soms snelheden tot 80kmh halen
doch modificaties zullen zich zeker na korte tijd opdringen.
Een mooi voorbeeld hierbij is de Spartan. In forums lees ik veel negatieve
reacties over de resultaten met de stock set-up en koeling als er gevaren wordt
op 6S. De Spartan is een prima boot op 4S doch om betrouwbaar op 6S te kunnen
varen zullen modificaties zich zeker opdringen (betere (dual) koeling, metalen
koelmantel, andere ESC (minimum 125A continious), 4,75 flex-as en een metalen
schroef). Mijn Spartan is uiteraard gemodificeerd …
De reverse functie van de ESC van RTR boten is standaard ingeschakeld. Schakel
deze bij voorkeur uit want in reverse gaat de flex-as na een tijdje defect. De
wikkelingen die in een bepaalde richting omheen de kern zijn geweven komen los
als deze in omgekeerde richting draait.
Veel mensen kennen maar 2 standen op hun afstandsbediening, zijnde vol gas of
niets. Deze sprint acceleraties zijn heel fascinerend maar in het geheel niet
goed voor alle hardware. Te grote stroomafnames zorgen voor oververhitting, de
te plotse krachten belasten de kogellagers van de motor (wat resulteert in
speling) en alle andere bewegende delen (flex-as, koppelingen, ea …). Probeer
eerst 10 tot 20 seconden op halve kracht te varen zodat de koeling (waterdoorstroming) optimaal is alvorens
vol gas geven. Neem in de bochten wat gas terug zodat je langer vaarplezier kan
beleven.
Iemand die veel ervaring heeft met RC auto’s kan een pistoolzender gebruiken
doch ik raad iedereen aan om standaard een stickzender te gebruiken teneinde de
boot beter onder controle te kunnen houden.
Slot:
Al het bovenvermelde is gebaseerd op 3 jaar testen zonder noemenswaardige
schade of defecten te hebben ervaren. Ik heb veel informatie via forums
verzameld en deze naar eigen goeddunken (en beschikbaar budget J) aangepast.
Hierbij alvast mijn dank aan de collega modelbouwers die hun ervaringen online delen.
Ik hoop dat mijn uiteenzetting en tips jullie wat heeft en zal helpen om een juiste
keuze te maken bij de aankoop en/of modificatie van een hydro boot.
Als er nog extra vragen zijn aarzel dan niet om mij te contacteren via mail door
op de link “webmaster” (rechts onderaan deze post) te klikken.
Zelf ben ik trotse eigenaar van volgende brushless boten, uiteraard allemaal
gemodificeerd :
- Proboat Voracity 36
- Proboat Shockwave 36
- Proboat Formula Fastech
- Aquacraft Lucas Oil
- TFL Genesis Blue White Flame / Staufenbiel
- TFL Smash Shark
- Traxxas Spartan
- Traxxas DCB M41
- ABC Hobby Gancia dei Gancia
- RCMK Hydro HSX
Webmaster (Frank)
Snelheid van uw RC boot berekenen :
Diameter schroef (mm) x pitch schroef x toerental motor x 60 / 1.000.000 = theoretische snelheid
Merk op :
Het gaat hier over het theoretisch toerental van de motor zonder
belasting.
In realiteit gaat ongeveer 25 procent
verloren van het toerental wanneer deze belast wordt .......
en dan moet er nog eens rekening gehouden worden met de weerstand in het water (wrijving van de onderzijde
van de romp en de remmende kracht van het roer).
Voorbeeld :
Catamaran (Hydro) met volgende setup:
Motor Leopard 3660-2050Kv – CNC prop 42mm – 1,4 Pitch – 4S lipo (14,8V)
Onbelast (theoretisch): (2050 x 14,8 = 30.340 rpm)
42mm x 1,4 x 30.340 rpm x 60 / 1.000.000 = 107 kmh
Belast (theoretisch): (30.340 rpm wordt 22.755 rpm)
42 mm x 1,4 x 22.755 x 60 / 1.000.000 = 80 kmh
De werkelijke snelheid :
Deze zal nog eens +/- 5 procent lager liggen dan de snelheid met belaste motor
omwille van de weerstand van de romp en het roer in het
water.
80kmh – 5% = 76 kmh.
Deze snelheid komt ongeveer overeen met de snelheid die ik heb gemeten.